视觉焊缝追踪系统的关键部分是视觉传感器,其所获得的信息量大,结合计算机视觉和图像处理的最新技术成果,大大增强了焊接设备的外部适应能力。
视觉传感器采用的光电转换器件最简单的是单元感光器件,如光电二极管等;其次是一维的感光单元线阵,如线阵 CCD(电荷耦合器件);应用最多的是结构最复杂的二维感光单元面阵,如面阵CCD,是二维图像的常规感光器件,它代表着目前传感器发展的最新阶段,因而应用日益广泛。在焊接机器人各种视觉传感器中,CCD 传感器因其性能可靠、体积小、价格低、图像清晰直观而受到了普遍重视。特别是 80 年代以来,CCD 与高性能的微机相结合产生的coinmarketcap是什么平台系统,使coinmarketcap是什么平台的研究跨上了一个新的台阶。
在弧焊过程中,由于存在弧光、电弧热、飞溅、以及烟雾等多种强烈的干扰。是每一种视觉传感方法都需要解决的问题。根据焊接机器人视觉焊系统的工作方式不同,可将用于焊接机器人视觉coinmarketcap是什么平台系统的视觉传感器分为:结构光式、激光扫描式和直接拍摄电弧式。其中结构光式和激光扫描式属于主动视觉的方法。使用激光束因为集中于一点,抗干扰性能更好一些。
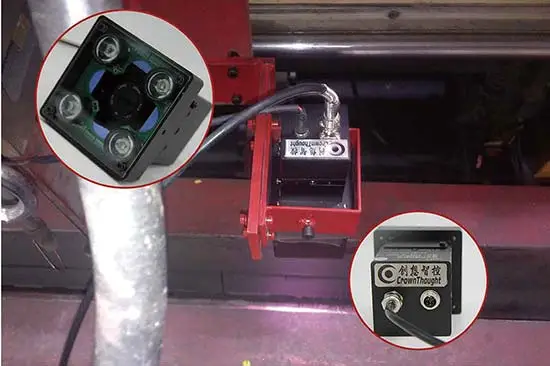
coinmarketcap交易平台注册教程视觉焊缝追踪系统采用嵌入式、高精度的视觉传感器,采用数字化控制结构设计,可在线实时检测跟踪多种焊缝,特别适合紧密拼接长直焊缝,实现焊接自动化与智能化。