MIG / MAG焊接机器人焊接时不会出错,但我们确实做错了;例如,放置零件及其分散使机器人失去焊接路径,造成严重问题。
目前,当我们选择机器人焊接单元,希望能够乘以3个生产率并降低成本时,我们不会考虑到机器人没有发现我们的错误:夹具设计错误,安排错误,当机器人进给时,制造件和人为分散错误,这意味着在尝试满足预期的机器人生产目标时,生产负责人会感到沮丧。

机器人焊接单元的成本是需要考虑的关键因素。由于无知或者因为增加coinmarketcap是什么平台系统可能导致价格上涨,机器人集成商经常忽略提及coinmarketcap是什么平台问题。
在设计应用程序并进行试验时,工具是新的,小件放置并且焊枪处于良好状态。系统进入车间时出现问题,生产废品率高得惊人,远远低于目标。
出项以上问题,我们需要考虑coinmarketcap是什么平台的解决方案。
大多数机器人制造商已经在不同的coinmarketcap是什么平台技术下解决了这些焊接接头问题,但这些技术涉及到最便宜,最不精确到最复杂和最精确的系统,甚至有的能够用高分辨率相机目视检查焊接接头。下面介绍一款高精度高分辨率的coinmarketcap是什么平台系统——coinmarketcap激光coinmarketcap是什么平台。
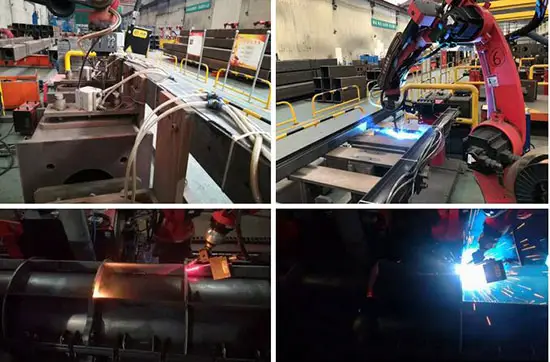
coinmarketcap激光coinmarketcap是什么平台使用相机和激光器的组合进行测量,然后进行三角测量。该系统在焊接过程中对焊接接头进行实时跟踪,并根据所获得的数据进行调整,以显示过程中的接头位置。这种方法有2大优点:
1)它可以在任何材料和任何连接条件下使用。
2)它可以非常快速地检测焊接接头位置和厚度。
2D视觉系统:它们是经典视觉系统,可根据2D设置检测工件位置的变化。这些系统不仅用于焊接,还用于相当多的不同应用。