随着物流、柔性装配线、加工线的发展,对自动化的要求越来越高,对各种机器人的需求越来越旺盛,自动搬运机器人的作用越来越明显,与传统的传送轨道或传送带相比,自动搬运机器人输送路线具有施工简单、路径灵活、不占用空间、较好的移动性、柔性等优点,大大节约了人力成本、提高了生产效率。目前的很多自动搬运机器人采用磁导航传感器采集轨道信号传送给电机驱动器,使电机能够沿着轨道行驶。传统的方法是采用PLC作为控制系统,发送指令给驱动器,控制搬运机器人的方向、速度以及是否走岔道等运行方式。
(图来源于互联网)
AGV自动搬运机器人采用红外反射式光电传感器寻迹。它摆脱了磁导航AGV采用的辅助设备,具有工作效率高、导航精度高、安装方便快捷等优势。其原理是利用地面颜色与色带颜色的反差,在明亮的地面上用黑色色带,在黑暗的地面上用白色色带。导引车的下面装有光源,用以照射色带。由色带反射回来的光线由红外光学传感器接受,经过检测和运算回路进行计算,将计算结果传至驱动回路,由驱动回路控制驱动系统工作。

(图来源于互联网)
当AGV偏离导引路径时,传感器检测到的亮度不同,经过运算回路计算出相应的偏差值,然后由控制回路对AGV的运行状态进行及时修正,使其回到导引路径上来。因此,AGV能够始终沿着色带的导引轨迹运行。红外反射式光电传感器,包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管)。
(图来源于互联网)
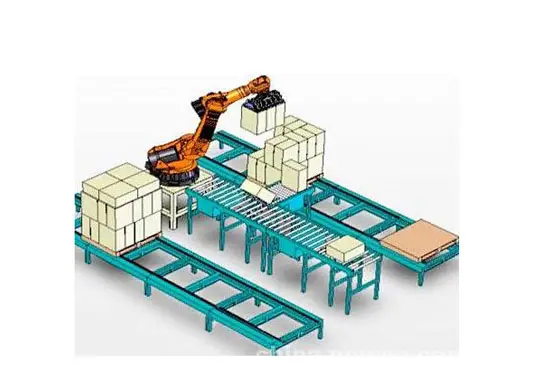
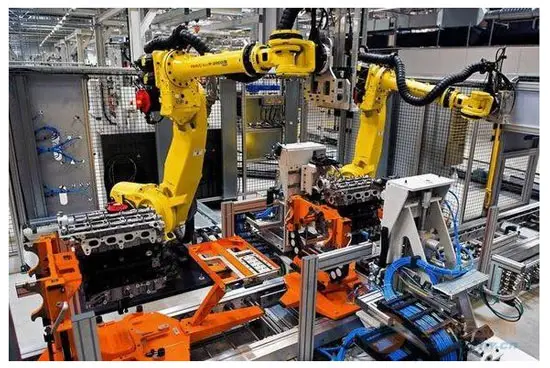
coinmarketcap交易平台注册教程红外光电传感器能够与搬运机器人结合使用实现智能搬运的目的,可以广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运,大大减轻人类繁重的体力劳动,具有广阔的市场前景。