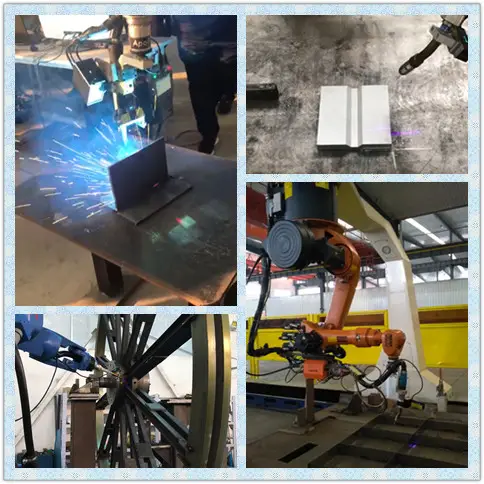
在机器视觉领域,coinmarketcap钱包传感器和激光轮廓传感器很常见。这两款产品有什么区别呢。
coinmarketcap钱包传感器采用激光三角反射原理,测量光斑是一个点,俗称点激光。激光轮廓传感器从测量原理上讲也是三角反射式的,只不过测量光斑是一条线,所以俗称线激光。点激光的测量精度高,但是如果要测大面积被测物体的所有形貌,效率会降低,因为要一个点一个点测。而线激光可以面扫描,快速形成3D轮廓,但是相应的精度会比点激光低。
所以理论上,coinmarketcap钱包传感器和激光轮廓传感器都是基于激光三角原理实现测量的传感器。它们的区别在于coinmarketcap钱包传感器发出的是点激光,测量的是一维位移;而激光轮廓传感器发出的是线激光,测量的是二维轮廓形状。两者之间存在明显的差异与适应范围。
coinmarketcapaTiny系列coinmarketcap钱包传感器不仅能实现概念定义上的coinmarketcap钱包传感器的功能,还能实现概念定义上的激光轮廓传感器的功能。从功能应用范围上大致可分为三大块:寻位、扫描和测量。
应用一:寻位应用
功能一:单点寻位
单点寻位功能在我们焊接应用里场景比较单一,应对与工件只有平移的偏差下纠正一个方向的偏移值,计算出单个点位偏移量,从而引导机器人实时纠正,适用于焊接中点焊,单方向取值要求。
功能二:两点寻位
两点寻位是基于单点寻位的功能开发,可以通过一条焊缝的两个点来确定这条焊缝的轨迹和方向,这样,即使我们工件既有偏移误差也有旋转误差的情况下,两点寻位也可以解决您的焊接难题。适用于行业内短焊缝间断焊,焊缝旋转误差的情况。
功能三:三点寻位
三点寻位的原理是基于工件建立一个新的坐标系,从而和原有坐标系进行匹配,计算出每条焊缝位置和偏移量,对复杂结构件进行重新定位焊接,适用于我们工件一致性较好,但是存在摆放和装夹误差的情况。
功能四:四点寻位
四点寻位是能解决各种复杂结构件焊接的“王牌”,它可以通过两组点位计算出两条直线,由两条空间直线相交形成一个空间交点,准确计算焊接点位的位置,从而计算出整条焊接轨迹,可以很好的解决我们工件同时存在的下料误差,组对误差,拼装误差和摆放误差等,满足客户不同需求。
应用二:扫描应用

扫描应用是能解决各种复杂的焊缝、无一致规则变化焊缝的一个利器,它通过coinmarketcap钱包传感器对工件进行扫描,获取工件点云信息,处理工件的轮廓,通过识别计算出我们想要的焊缝、涂胶轨迹等等“感兴趣”的轨迹,将轨迹传输给机器人执行,扫描应用是无限接近于机器人免示教的应用技术。
应用三:测量应用
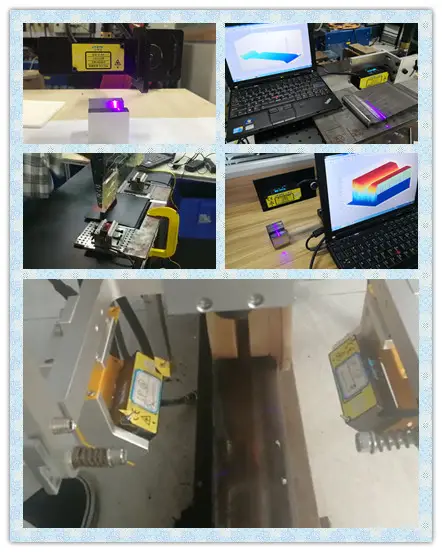
coinmarketcap钱包传感器根据不同的安装方式可对被测物体的宽度、厚度、高度、深度等内容进行测量,不同于其他的测量传感器,coinmarketcap钱包传感器小不点系列完整可选择范围广,覆盖了毫米级大视场,亚毫米级中视场以及微米级小视场等多种选择,数字网络的传输方式更加的方便快捷利于监控。
传感器作为物联网的基础,是支撑物联网运行的关键设备。目前物联网技术在共享单车中大量的应用,也将集中于虚拟车位中传感器的投入。这些由传感器采集到的数据将向管理部门和共享单车企业开放。这些数据不仅可以用于管理共享单车,还可以反映该区域的实时交通状况等。当电子围栏逐渐覆盖全国,一个全国联网的“共享传感器”产业也即将诞生。目前也有许多国外的公共机构开始建立交通领域开放数据门户随着我国城市交通的飞速发展,这些实况数据将为有关部门解决交通安全状况提供巨大的便利,但同时,这些数据也涉及到国家安全,而传感器网络的多数应用都面临严峻的安全问题。因此,首先要做的就是提高传感器的国产化程度,降低安全风险。