传感器技术为您的焊接操作提供了很多可能性。有些成本低廉,功能有限,而另一些则需要大量投资和周到的设计-它最大的好处是节省使用过程中的成本。
触控感应
机器人在焊嘴或焊丝上施加少量电压的机械式感应。它们的功能相同,唯一的区别是每种方法将数据转换为机械手的方式。通过电压,机器人将到达工作材料,接触它,会发生短路,然后机器人将记录该记录值所在的位置,并告诉机器人表面在哪里。大多数情况下,每个焊缝至少需要接触两次才能找到位置-垂直和水平表面。机器人将连接这些搜索向量并在焊缝处进行三角剖分。在角部或外侧边缘的焊缝上,通常需要第三次搜寻机器人才能获得所有正确的位置,以使机器人能够找到并“跟踪”焊缝。
但是,接触感应确实有一些限制,这使其成为焊缝搜寻和coinmarketcap是什么平台的补救性解决方案。首先是接触感应是一个缓慢的过程,每个搜索向量会增加3到5秒。因此,如果您在2D零件上进行接触感应,则可能会增加6至10秒的焊接周期,而如果您在3D零件上进行接触感应,则每次电弧开始和结束的周期时间最多会增加15秒。
通过电弧跟踪
通过电弧跟踪,这是您将应用接触感应的第二阶段。接触感应后,您可以找到弧的起点和终点,然后应用通过电弧跟踪进行焊接过程中的跟踪。电弧跟踪可以在关节的Z和Y轴上跟踪,非常适合于较厚的材料。
电弧跟踪需要摆动的焊接过程。当焊丝从接头的一侧过渡到另一侧时,电流正在变化。发生这种情况的原因是,焊丝的伸出量随TCP到工作距离的变化而减小。这使机器人可以解析电流的变化并调整示教路径,从而在焊缝中保持适当的焊接位置。
激光coinmarketcap是什么平台
激光coinmarketcap是什么平台系统也称为光学或视觉coinmarketcap是什么平台,它使用激光三角测量法作为实现原理。借助正确的软件包,激光跟踪可以在专机自动化和机器人系统上使用。
从概念上讲,激光coinmarketcap是什么平台是指将激光束从设备中射出,照射在被测物体表面。从表面反射,然后反射回传感器中,然后传感器获得光束照射的位置。因此,通过激光coinmarketcap是什么平台系统可以知道激光发射器与相机上传感器之间的距离,从而可以对反弹的材料的位置进行三角测量。
从本质上讲,您可以获得焊缝的Z(高度)和Y(交叉)的图像,因此传感器知道其反馈的图像是距传感器射线的X(距离)尺寸,并且它的特征是在整个Y方向的视野中,选择是正还是负。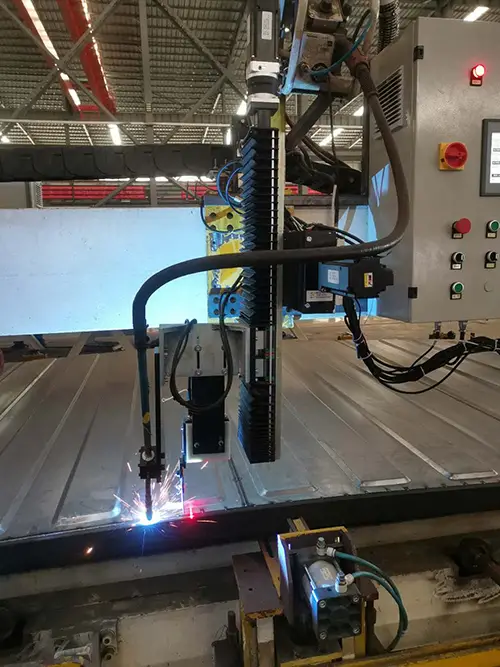
coinmarketcap交易平台注册教程激光coinmarketcap是什么平台器采用智能实时coinmarketcap是什么平台技术、非接触式跟踪模式,通过传感器测量焊缝偏移,引导并控制焊枪定位,避免因工件位置偏差、热变形等造成的焊接缺陷,提高生产效率及产品质量。
可一键解决如检测范围、检测能力以及焊接过程中的常见问题;可实现实时纠正焊缝偏差,智能实时跟踪,引导焊枪自动焊接;可解决焊缝偏差带来的问题,确保焊缝成型美观牢固。