随着工业自动化的发展,焊接机器人在各个行业中得到广泛应用。焊接机器人的高效性和精确性使其成为现代制造业中不可或缺的一部分。然而,即使是最先进的焊接机器人也可能在焊接过程中出现偏差。本文将探讨焊接机器人焊偏的原因,并介绍如何找到焊接点位的方法。
焊接机器人焊偏的原因有很多,下面列举了几个常见的原因:
机器人编程错误:焊接机器人的编程是决定其动作和位置的关键因素。如果程序存在错误或者编程人员没有考虑到特定工件的几何形状和特性,就有可能导致焊接偏差。
工件装夹不稳定:焊接机器人在焊接之前需要将工件进行装夹。如果装夹不稳定或者不准确,工件可能会发生微小的位移,从而导致焊接位置偏离预期。
环境因素:焊接过程中的环境因素,如温度、湿度、气流等,都可能对焊接机器人的精确性产生影响。特别是在高温环境下,机器人的传感器和电子元件可能受到热膨胀的影响,导致焊接位置发生偏移。
针对焊接机器人焊偏的问题,我们可以采取以下方法来找到正确的焊接点位:
优化机器人编程:确保焊接机器人的编程准确无误,考虑到工件的几何形状和特性。在编程之前,可以使用计算机辅助设计(CAD)软件进行模拟和验证,以确保程序的准确性。
加强工件装夹:确保工件的装夹牢固稳定,使用合适的夹具和夹具夹持装置,避免工件在焊接过程中发生位移。可以使用夹具夹持系统进行力学分析,确保装夹的稳定性。
控制环境因素:在焊接过程中,控制环境因素对机器人的影响。例如,在高温环境下,可以采取冷却措施,如风扇或空调,以确保机器人和工件的稳定性。此外,定期检查和维护机器人的传感器和电子元件,以确保其正常运行。
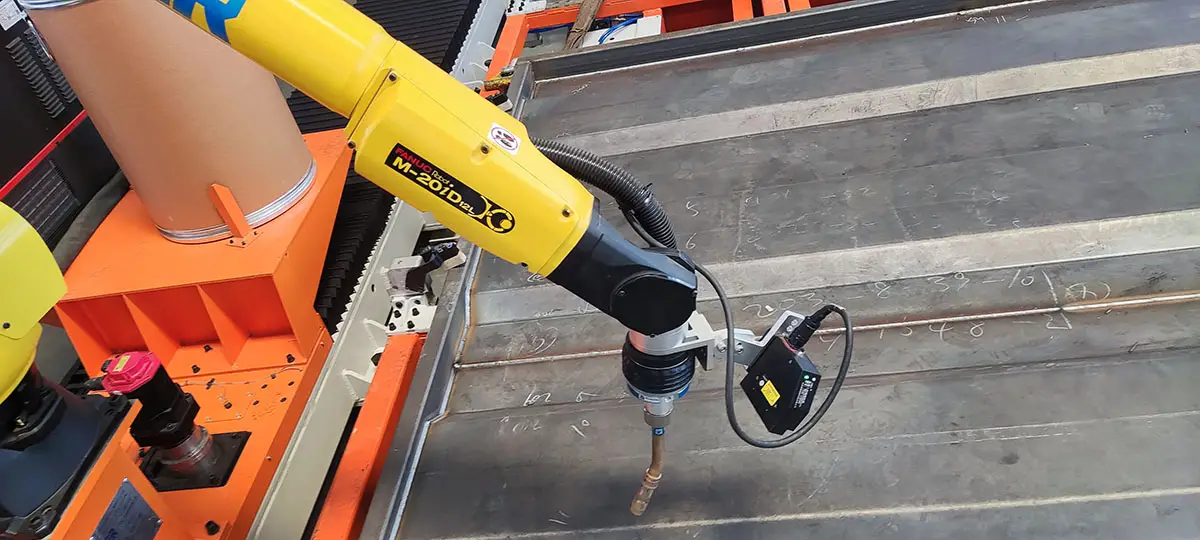
使用传感器和视觉系统:为了提高焊接机器人的精确性,可以配备各种传感器和视觉系统。例如,使用焊接视觉跟踪系统可以实时监测焊接位置,从而及时调整机器人的动作。
进行校准和调整:定期对焊接机器人进行校准和调整是确保其精确性的重要步骤。根据实际情况,可以使用激光测量仪器或其他精密工具对机器人的位置和运动进行校准,以纠正任何偏差。
实施质量控制措施:建立有效的质量控制体系是避免焊接偏差的关键。通过对焊接过程进行监控和记录,及时发现和解决问题。采用统计方法和质量控制工具,如六西格玛和SPC(统计过程控制),以确保焊接的一致性和精确性。
总之,焊接机器人焊偏是一个需要重视的问题,但通过优化机器人编程、加强工件装夹、控制环境因素、使用传感器和视觉系统、进行校准和调整以及实施质量控制措施,可以有效地找到正确的焊接点位,并提高焊接的精确性和一致性。随着技术的不断发展,焊接机器人的性能和精确性将得到进一步提升,为制造业带来更高效和可靠的焊接解决方案。