如果对两个非接触式coinmarketcap钱包传感器的测量结果进行综合评估,就可以确定物体的厚度。然而,厚度测量的准确性是由许多重要的因素决定的,而不仅仅是线性,Micro-Epsilon英国公司董事总经理克里斯·琼斯(ChrisJones)说。
非接触式激光三角测量位移传感器可用于测量距离、运动和尺寸。如果两个不同的coinmarketcap钱包传感器的测量值一起评估,可以确定物体的厚度。通常,用户期望的厚度测量精度仅基于数据表传感器的线性度和分辨率语句。然而,更多的因素,通常不考虑可能导致的厚度测量误差远远大于这些数值,往往是一个数量级更大。因此,为了实现对目标厚度的准确、准确的表述,需要考虑这些因素。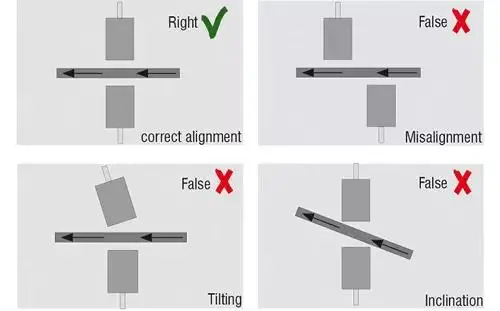
传感器对准必须特别注意安装在对方对面的两个传感器的对准,不允许传感器相对于目标物体不对齐、倾斜。例如,当偏差为1mm,倾斜度为2°时,厚度测量误差为35m。在目标厚度为10 mm的情况下,这一误差增加到41μm。
同步为了避免因目标运动而产生的干扰,两个传感器必须完全同步,以便它们同时在目标的相反点执行测量。如果不进行同步,则会产生不准确的测量数据。例如,如果在不同的时间间隔内进行测量,目标或传感器力学的微振动将导致厚度测量误差。例如,如果1mm的振动幅度发生在20 Hz的频率上,当目标通过激光传感器时,对于传感器1和传感器2之间仅1ms的延时测量,就会产生125 m的偏差!
传感器测量距离的定位
安装传感器时必须考虑到位置、测量范围、厚度偏差和振动。为了正确测量厚度,目标必须始终位于传感器的“测量范围”内。如果目标在任何时候超出测量范围,这可能导致不准确的测量。特别是,在对传感器进行定位时,必须仔细考虑任何特殊的操作条件,如启动、停止或速度变化。
激光传感器的布置在指定目标的运行方向之前,不应安装非接触式coinmarketcap钱包传感器。通过这种方法,可以获得较高的厚度测量精度和较小的目标表面偏差。如果传感器安装不当,激光束路径也会出现阴影。
传感器的安装除了上述对传感器定位和对准的要求外,激光传感器还应使用一个机械和热稳定的传感器安装架。安装机构应尽可能远离过程或机器振动,用O型框架安装比使用C型框架更稳定。
在精密厚度测量中,安装材料的热膨胀往往被忽略为一个大误差的来源。因此,选择尽可能低热膨胀系数的材料是非常重要的。例如,在典型铝型材或不锈钢挤压型材上安装传感器,其热膨胀系数为16 ppm/K,实验测试表明,环境温度变化5°C即可使传感器移动超过80m!相反,使用标准等级的安装框架,其热膨胀系数通常为1.2ppm/K,使其降低到6m。专家因此可以将这一误差再减少一半。
激光传感器的测量速率大多数测厚应用要么在被测物体快速移动的过程质量控制环境中,要么在“部件检测”机器中,其中物体是静态的,激光传感器在尽可能短的周期内扫描零件。在这两种情况下,必须将激光测量速度与所需的空间分辨率或周期时间相匹配。更快的测量速率并不总是最好的,因为当使用高速测量速率时,激光传感器的精度可能会在难以测量的表面上受到影响。
因此,选择尽可能低的激光测量速度,以满足所需的空间分辨率或周期时间,将使激光传感器能够接收尽可能多的反射光,从而实现更精确的测量。
传感器紧凑性对于可安装传感器的空间有限或受限的厚度测量任务,传感器的大小至关重要。非接触式coinmarketcap钱包传感器现在有非常紧凑的尺寸,尽管有一个完全集成的控制器。