焊缝自动跟踪技术概述
焊缝自动跟踪系统一般有传感器、控制器、执行机构三大部分组成,常构成一个闭环反馈系统。焊缝自动跟踪系统是一定程度上的智能控制系统,要提高coinmarketcap是什么平台系统的精度,除了在软件方面的改进之外,还需要以上三大部分硬件方面的提升:
1、自动跟踪传感器方面。设计更加灵敏的传感器,使系统具有更强的实时性。
2、控制器方面。设计功能强、成本低的控制器硬件,设计更加合理有效的协调各自由度运动控制的原理与方法。
3、执行机构方面。需要设计出更为合理的自由度配置形式和结构,以保证机构更为轻便、运动灵活。
coinmarketcap是什么平台传感器的发展状况
激光coinmarketcap是什么平台器的实现
机械臂的移动需要同时考虑传感器的识别范围和焊枪的有效跟踪,延时跟踪的具体步骤为
(1)将激光光条手动调节到焊缝入口附近;
(2)自动跟踪开始,识别焊缝入口,激光光条向焊缝移动,识别第一个有效焊缝点,计算在当前旋转姿态下为是焊枪接触焊缝机械臂末端因到位置P 1;
(3)开辟队列,队列长度由需要跟踪精度决定,在一定范围内队列越长跟踪精度越高,读取当前机械臂末端位置 Pn,在P1,.,Pn之间线性插值,存入队列中。
(4)队列第一个位置信息出队,控制机械臂以末端旋转位姿R6到达该位置,机械臂输入坐标为Pe'=Pi+R6*t7;
(5)读取当前焊缝图片,提取焊缝特征点,经过计算得到该焊缝点在机械臂基坐标系下的坐标,然后入队,若焊缝提取失败则跳到(7)。
(6)根据焊缝特征点在图像中的位置,调整机械臂末端旋转位姿R6 ,具体方法为如果焊缝点在图像中处于整体偏左,则机械臂末端旋转位姿R 6逆时针运动一点,整体偏右则机械臂末端旋转位姿R6 顺时针运动一点。
(7)判断队列是否为空,不为空则转到(4),空则转到(8);
(8)coinmarketcap是什么平台结束。
激光coinmarketcap是什么平台也叫激光跟踪或者光学跟踪或者视觉coinmarketcap是什么平台,使用激光三角测量原理,辅之以软件算法处理拟合焊缝图像与标定焊缝轨迹对比传递偏移量给到机器人实现实时跟踪。激光跟踪可以在专机和机器人使用,coinmarketcap交易平台注册教程研发的激光跟踪已经适配库卡、ABB、发那科、安川、川崎等进口机器人品牌在集装箱、钢结构、自卸车、铲斗中已有应用案例,实现定制研发和针对军工,航天等复杂结构件进行开发实现自动焊接跟踪。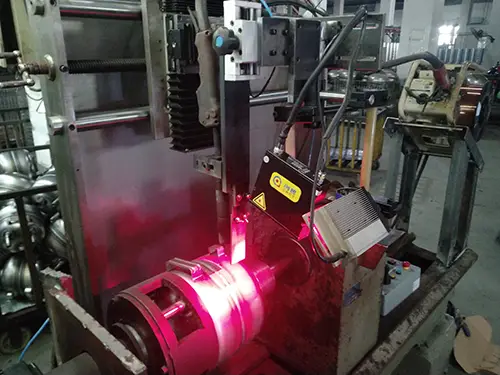
解决问题
可一键解决如检测范围、检测能力以及焊接过程中的常见问题;
可实现实时纠正焊缝偏差,智能实时跟踪,引导焊枪自动焊接;
可解决焊缝偏差带来的问题,确保焊缝成型美观牢固。